
Artikulatoren werden gebraucht. Sie stehen an der Schnittstelle zwischen Praxis und Labor und sind nach wie vor die entscheidende Arbeitsgrundlage, die den Patienten in der Laborumgebung darstellt. Deswegen ist es wichtig, den Funktions- beziehungsweise Informationswert dieser Arbeitsgrundlage so gut wie möglich zu optimieren, damit die Arbeit für den Patienten oder die Diagnostik und die Fallplanung so gut wie möglich gelingen können. In diesem Beitrag wird die aktuelle Systematik der virtuellen und digitalen Systeme vorgestellt und es werden deren Unterschiede erläutert. Auch wird in diesem Beitrag ausführlich diskutiert, ob und wann es sinnvoll sein kann, mittelwertige oder individuelle Gesichtspunkte für den Gebrauch der virtuellen Artikulatoren zu berücksichtigen. In jeden Fall ist bis heute viel klinische Erfahrung hilfreich.
Frage an den Autor
Welchen Vorteil bietet der virtuelle Artikulator?
Prof.?Dr.?Bernd Kordaß: Sind die digitalen Artikulator-Varianten beispielsweise in der Mehrheit digitale 3-D-Kopien mechanischer Vorbilder mit vergleichbarem Funktionsumfang, so bietet die Ankopplung an geeignete elektronische Messsysteme und/oder bildgebenden Systeme zusätzliche Optionen, die mit der Kategorie realdynamische oder als Untergruppe realanatomisch-dynamische VR-Systeme (Virtual Reality) verbunden sind. Der Funktionswert der virtuellen Lösungen im Unterschied zu den konventionell-analogen Artikulatoren ergibt sich durch den überragenden Mehrwert in der Visualisierung okklusaler Verzahnungsbeziehungen, aber auch durch eine Vielzahl von zusätzlichen Informationen, die mit dem einzelnen Okklusionskontakt verbunden sind: Neben der Lokalisation und der Ausdehnung sind es der Zeitbezug, die Häufigkeit des Auftretens, die Stärke und die Kaukräfte, die beim Okkludieren auftreten können.
Einführung und Definition
Artikulatoren sind gleichermaßen für die zahnärztliche Praxis und das zahntechnische Labor unverzichtbare Werkzeuge und stehen an deren Schnittstelle als Grundlage der professionellen Kommunikation. Je besser die Artikulatoren für den jeweiligen Patientenfall funktionell ausgerichtet sind, desto besser funktionieren die Arbeiten im Mund des Patienten und desto besser und sicherer lassen sich diagnostische und therapeutische Aspekte ableiten. Deswegen haben Artikulatoren einen Funktionswert, der je nach Aufgabenstellung quantifiziert werden kann (Böttger 1982) [1].
Böttger definiert diesen Funktionswert im Zusammenhang mit der grundlegenden Aufgabe des Artikulators, die Funktion des zur Behandlung anstehenden Falls möglichst fehlerfrei zu reproduzieren. Der Artikulator sollte eine doppelte Funktion erfüllen:
- die Modelle eines Behandlungsfalls zueinander in eine bestimmte Relation bringen und neben den Öffnungs- und Schließbewegungen auch Gleitbewegungen wie sie im Mund vorkommen exakt nachahmen und
- neben dieser Grundvoraussetzung auch eine Funktionsanalyse sowie das Arbeiten an den Modellen bei der Herstellung von Zahnersatz und prothetischen Behelfen ermöglichen, und zwar ohne besondere Schwierigkeiten. [1].
Aus der letzten Bemerkung und zwar ohne besondere Schwierigkeiten? spricht der zur damaligen Zeit überragende Praktiker Prof.?Herrmann Böttger. Ihm war es wichtig, dass die zur Anwendung kommenden Artikulatoren in jeden Fall hilfreich sind und die Aufgabe selbst nicht unnötig verkomplizieren. Wer die Gelegenheit hatte, ihn als Chef oder Professor in Vorlesungen und Seminaren erleben zu können, weiß um seinen unbedingten Pragmatismus. Von ihm ist die Bemerkung über den Gebrauch von Artikulatoren überliefert, dass es für den Praktiker im einzelnen Patientenfall eigentlich unerheblich sei, die Funktionsweise des Uhrwerks genau zu kennen, wenn man doch eigentlich nur wissen möchte, wie spät es ist. Damit war nicht der wissenschaftliche Diskurs als solcher und das Ringen um wissenschaftliche Erkenntnis gemeint, sondern die Fokussierung auf das Wesentliche in einem Patientenfall, damit dieser mit vertretbarem Aufwand optimal gelöst werden kann.
Dieser Gedanke ist ganz sicher auch zielführend, wenn man an den Umgang mit digitalen Welten denkt. Die Komplexität der Informationsfülle, die theoretisch erfasst und ausgewertet werden kann, ist um ein Vielfaches größer als bei mechanischen Systemen, wenn man beispielsweise an die Ankopplung von bildgebenen Systemen oder Facescannern et cetera denkt. Ganz bestimmt wird es deswegen im Umgang mit digitalen Werkzeugen auf Strategien ankommen, aus der Überfülle der Informationen und Möglichkeiten das jeweils Relevante zu selektieren und gezielt einzusetzen. Dafür ist bis heute Erfahrung nötig, aber auch Hilfestellung, die die Entscheidung unterstützt.
Die oben genannte Definition selbst spricht aber für sich und ist in dieser Klarheit auch für die digitale Welt uneingeschränkt gültig. Ganz besonders hervorzuheben ist dabei die bereits damals geäußerte Aufgabe des Artikulators, die Bewegungen, wie sie im Mund vorkommen, exakt nachzuahmen, was unter den Bedingungen in mechanischen Artikulatoren allerdings immer schwierig und nur mit Einschränkungen möglich war und eigentlich erst jetzt mit den virtuellen Artikulatoren richtig gelingen kann. Natürlich lässt sich die damalige Definition von Böttger noch folgendermaßen sinnvoll ergänzen: Der Artikulator sollte darüber hinausgehend
- okklusions- und ästhetikrelevante Punkte, Linien und Ebenen, zum Beispiel die Kauebene, schädel- und gelenkbezüglich sowie mit den Aspekten der Gesichtsproportionen bis hin zur Kopfhaltung und Körperstatik, wenn erforderlich, darstellen,
- Veränderungen der Kieferrelation zu diagnostischen Zwecken oder für eine Therapieplanung patientenindividuell zulassen und
- eine patientenspezifische Probebehandlung an den Modellen ermöglichen als Grundlage für Diagnostik und Therapieplanung: additiv (zum Beispiel funktionelles und ästhetisches Wax-up/Mock-up), subtraktiv (zum Beispiel systematisches Einschleifen) oder positionierend (zum Beispiel für Implantate oder Adjustierungen der Zentrik) und Weiteres [4,15,8,16].
Mit der Digitalisierung ist zusätzlich verbunden, dass die digitalen Modelle selbst dynamisch werden und in vielfältiger Hinsicht in einer ganz neuen Dimension Informationsträger und nicht nur passive 3-D-Abbildungen der Oberflächen von Zähnen, Zahnreihen oder Kiefer sind. Die Initiative um Dr.?Bernd Reiss zum Dynamischen, digitalen Modell (DDM) greift diese Entwicklungen auf, bündelt die Expertise zu diesem Thema und versammelt einen Kreis von Experten zu dem jeweiligen Aspekt, der mit dem dynamischen Modell verbunden ist [11]. Die digitale Artikulation und Okklusion sind dabei nur ein Gesichtspunkt unter vielen. Ganz im Unterschied zu den mechanischen Modellen lassen sich beispielsweise unschwer Veränderungen über die Zeit implementieren und detailliert auswerten. Ein digitales Monitoring erfasst dabei einzelne Situationen in definierten Zeitabständen und überlagert die Einzelergebnisse (Matching), wobei sich Zahnsubstanzverluste (Abrasionen, Attritionen, Erosionen et cetera) oder beispielsweise Zahnwanderungen im Vergleich zur Ausgangssituation im Zehntelmikrometerbereich genau darstellen lassen [26,38]. Das gleiche gilt unter anderem für Farbinformationen oder auch Schwellungen und Rezessionen der Gingiva.
Ein immenses Fenster zu ganz neuen Sichtweisen und Ansichten wird dadurch aufgestoßen; zugleich müssen aber diese Daten im Kontext interpretiert und verwertbar gemacht werden. Stellungnahmen, die den aktuellen Stand des Wissens aufgreifen, stehen an und natürlich auch die Festlegung von Zielen und Fragestellungen, an denen jetzt konkret gearbeitet werden müsste. Dieser Artikel möchte in diesem Sinne ein Beitrag sein, den Aspekt der digitalen Okklusion und Artikulation, wie er in virtuellen Artikulatoren umgesetzt wird, genauer zu umreißen und die Punkte anzusprechen, die einer gezielten Klärung bedürfen.
Einteilung virtueller Artikulatoren
Wenn Artikulatoren darauf zielen, Öffnungs- und Schließbewegungen sowie auch Gleitbewegungen, wie sie im Mund vorkommen, exakt nachzuahmen, dann werden mit der Betonung auf im Mund vorkommend die üblichen Klassifikationsschemata für Artikulatoren bereits deutlich erweitert. Bisherige Klassifikationen orientieren sich an den Einstellmöglichkeiten im Gelenkbereich (mittelwertig, halbindividuell, individuell et cetera), weil dort die mechanischen Steuerelemente platziert sind, die die Bewegungen der Modelle zueinander definieren. Auf der virtuellen Ebene ohne die mechanischen Einschränkungen , mag es aber völlig gleichgültig sein, wo man räumlich gesehen eine Parametrisierung der Bewegungsabläufe verortet, im Idealfall werden diesem Gedanken folgend die realen Bewegungen des Patienten aufgezeichnet und die Modelle von Ober- und Unterkiefer diesen realen Bewegungen zugeordnet, sodass sich die Modelle genauso wie beim Patienten bewegen, ganz gleich, welche Bewegungen der Patient ausführt. Für diese Gruppe der virtuellen Artikulatoren hat sich der Begriff realdynamische virtuelle Artikulatoren eingeprägt [20,19,36,31,8]. Als eine Untergruppe könnten realanatomisch-dynamische Systeme gelten, wenn nicht Einzelpunkte oder Artikulatorgelenke, sondern anatomisch korrekt abgebildete Kiefergelenke in Bewegungsfunktion dargestellt werden [6,18,22,29]. Gegenüber der rein mechanischen Simulation ist das ein eminenter Fortschritt, der so auch nur mit den computerbasierten Systemen realisiert werden kann [34]. Davon grenzen sich digitale VR-Artikulatoren ab, die gewissermaßen digitale Kopien der mechanischen Vorbilder sind und ganz ähnliche Adjustierungen und Steuerelemente besitzen. Logischerweise unterliegen sie den gleichen Einschränkungen wie ihrer mechanischen Vorbilder mit Blick auf das Reproduzieren der Bewegungen, wie sie am Patienten ablaufen [19]. Ein Klassifikationsschema, das diese Art der Artikulatoren einschließt, hat Wittkowski vorgeschlagen [36] (Tabelle 1).
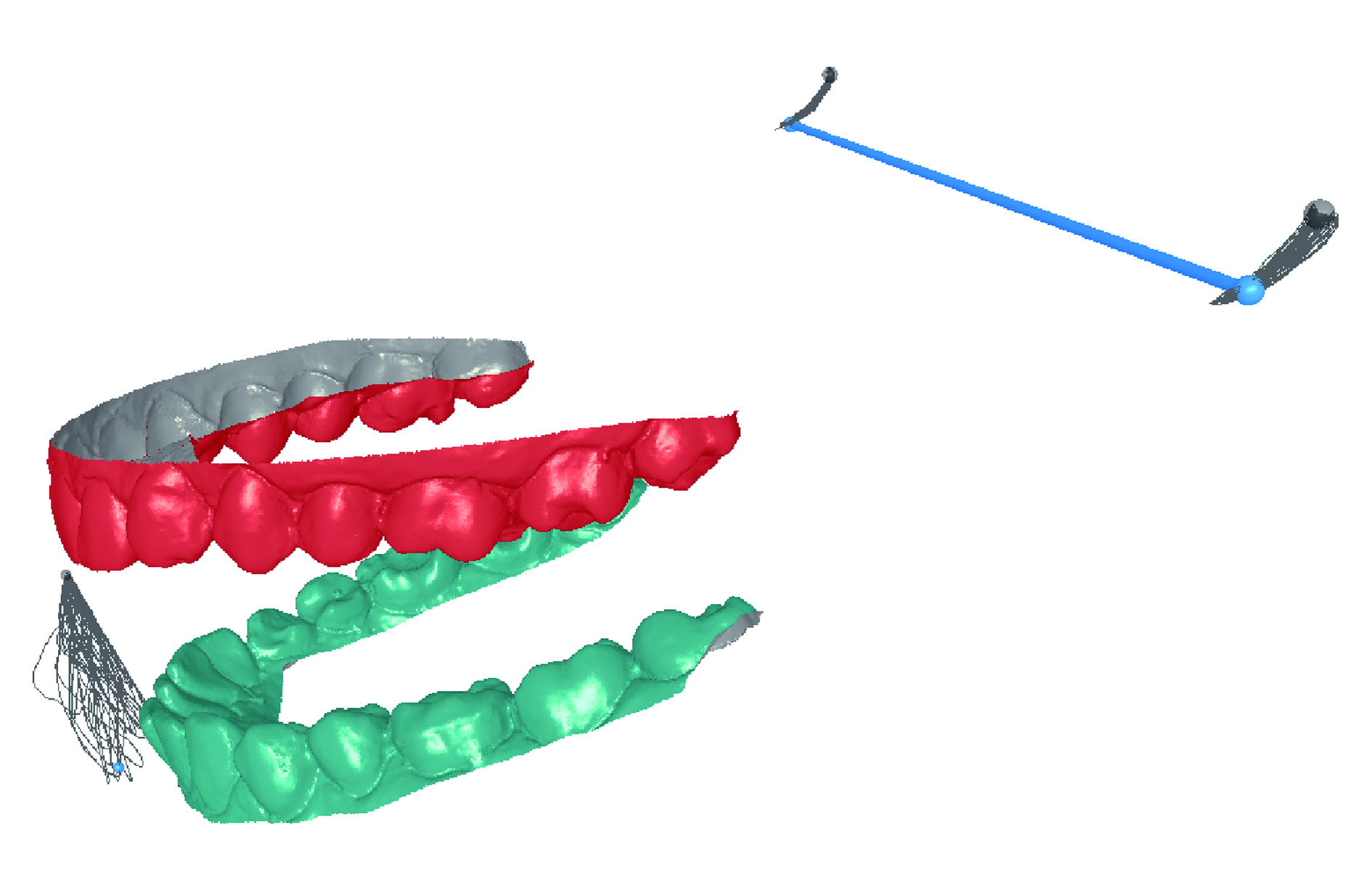
Es ist darauf hingewiesen worden, dass diese virtuellen Kopien mechanischer Artikulatoren bislang noch benötigt werden, weil in mancherlei Hinsicht indikationsbezogen nicht alle Fälle im rein digitalen Workflow gelöst werden können und einzelne Arbeitsschritte doch in einem mechanischen Artikulator erfolgen müssten [17]. Dann ergibt es Sinn, das digitale System mit dem mechanischen betreffend der Einstellungen und der geometrischen Beziehungen gleichzuschalten. Lösungen hierfür gibt es von vielen Dentalfirmen für den digitalen Workflow (Abb 1).
Hinsichtlich des Einsatzes der rein, das bedeutet ausschließlich, realdynamischen Lösungen ist bislang nicht richtig einschätzbar, wie sich das Bewegungsmuster gegenüber der Ausgangssituation verändert, wenn die Okklusion oder okklusale Führungselemente in nennenswertem Ausmaß auf- beziehungsweise umgebaut werden müssen.
In diesem Fall wird ja selbst eine Modellvorstellung darüber benötigt, wie sich das Bewegungsmuster nach Umstellung der Okklusion mit Änderung der Bisshöhe voraussichtlich ändern wird. Idealerweise findet man einen Bereich, der funktionell halbwegs stationär bleibt und an dem man Bewegungsbahnen aufzeichnen kann, die trotz Änderungen der Kieferrelation mehr oder weniger konstant bleiben [28,2]. Üblicherweise findet man dieses als stationäres Drehzentrum im Bereich der Kiefergelenke, das eine terminale beziehungsweise zentrische Scharnierachse bildet, um die der Unterkiefer geöffnet und wieder geschlossen werden kann, ohne dass sich die horizontale Komponente der Kieferrelation ändert. Ob es ein solches stationäres Drehzentrum in Wirklichkeit gibt oder ob es primär ein mathematisches Konstrukt ist, mit dem sich die Funktionsweise des Kiefergelenks annähernd beschreiben lässt, mag unterschiedlich gesehen werden; es ist in diesem Fall primär unerheblich, weil es ja nur darum geht, mit ungefährer Genauigkeit das angestrebte und zu erwartende Ergebnis simulieren zu können. Generell gilt dabei natürlich: Je genauer die tatsächliche Bewegung als Bewegung um ein angenommenes Drehzentrum abgebildet werden und je genauer ein solches Drehzentrum verortet werden kann, umso besser und funktionell angepasster wird das spätere Ergebnis sein können [23] (Abb.2).
Okklusale Bewegungen lassen sich in diesem Modell ganz unabhängig von der Bisshöhe oder der okklusalen Führung immer mit annähernd konstanten Bewegungsbahnen dieser Scharnierachse darstellen und mit gelenkspezifischen Werten, wie dem Kondylenbahnneigungswinkel (HCN), dem Bennett-Winkel (BW), dem Immediat Side Shift (ISS) und weiteren parametrisieren [14]. Im Prinzip imitiert dieses Modell die Funktionsweise eines individuell adjustierten, mechanischen Artikulators, der für diese Aufgaben, in welcher Form auch immer, sinnvollerweise virtuell hinterlegt sein sollte. Ansonsten lassen sich Punkt 4 und 5 in der genannten erweiterten Definition nicht optimal realisieren. Für Punkt 3 benötigt man zusätzlich Informationen über Gesichtsproportionen oder die schädel-/gelenkbezügliche Ausrichtung der Zahnreihen. Diese können aus bildgebenden Systemen wie dem DVT oder Gesichtsscannern stammen oder, wie bei mechanischen Artikulatoren mittels Behelfsteilen, wie einer Art Gesichtsbogen, umgesetzt werden. Elektronische Messsysteme, die aus der Bewegungsfunktion Drehzentren generieren oder Schädelbezugspunkte oder Punkte am Kopf und im Gesichtsbereich viele Digitizerfunktionen virtuell verorten, eignen sich besonders gut, die Voraussetzungen für die Punkte 3 bis 5 zu erfüllen [21].
| TypParame- ter |
Datenerfassung mittels | Restaurativ | Gegenkiefer | Positionierung der Kiefer und Bezug im Raum |
Kieferrelation mittels | Referenzwerte für Bewegungen | Bewegungen |
| Basis | Scan von Modellen & Registrat oder oral | partiell | okklusales Registrat | kein | zugeordnetem okklusalem Registrat | keine | keine |
| Fortgeschritten | Scan von Modellen oder oral | partiell oder ganzer Kiefer | partiell oder ganzer Kiefer | kein | seitlichem Scan beider Kiefer | einstellbar mittelwertig | Abfahren von geraden Bahnen |
| Individuell | Scan von Modellen oder oral | ganzer Kiefer | ganzer Kiefer | zu virtuellen Gelenken mittels: 1. Kalotte und Bezugspunkten, 2. Ausrichtschlüssel, 3. einartikulierten Modellen | seitlichem Scan beider Kiefer | Patentenregistrierung der Unterkiefer-Bahnen | Abfahren von Bahnen |
| Real-3-D | Scan von Modellen oder oral | ganzer Kiefer | ganzer Kiefer | zu virtuellen Gelenken mittels 3-D-Registrierung über Hilfsgeometrien | Registrierung des Patienten | Patentenregistrierung 3-D-Bewegungen des Unterkierfers | dynamische 3-D-Bewegungen |

Genauigkeitsaspekte zur digitalen Okklusion
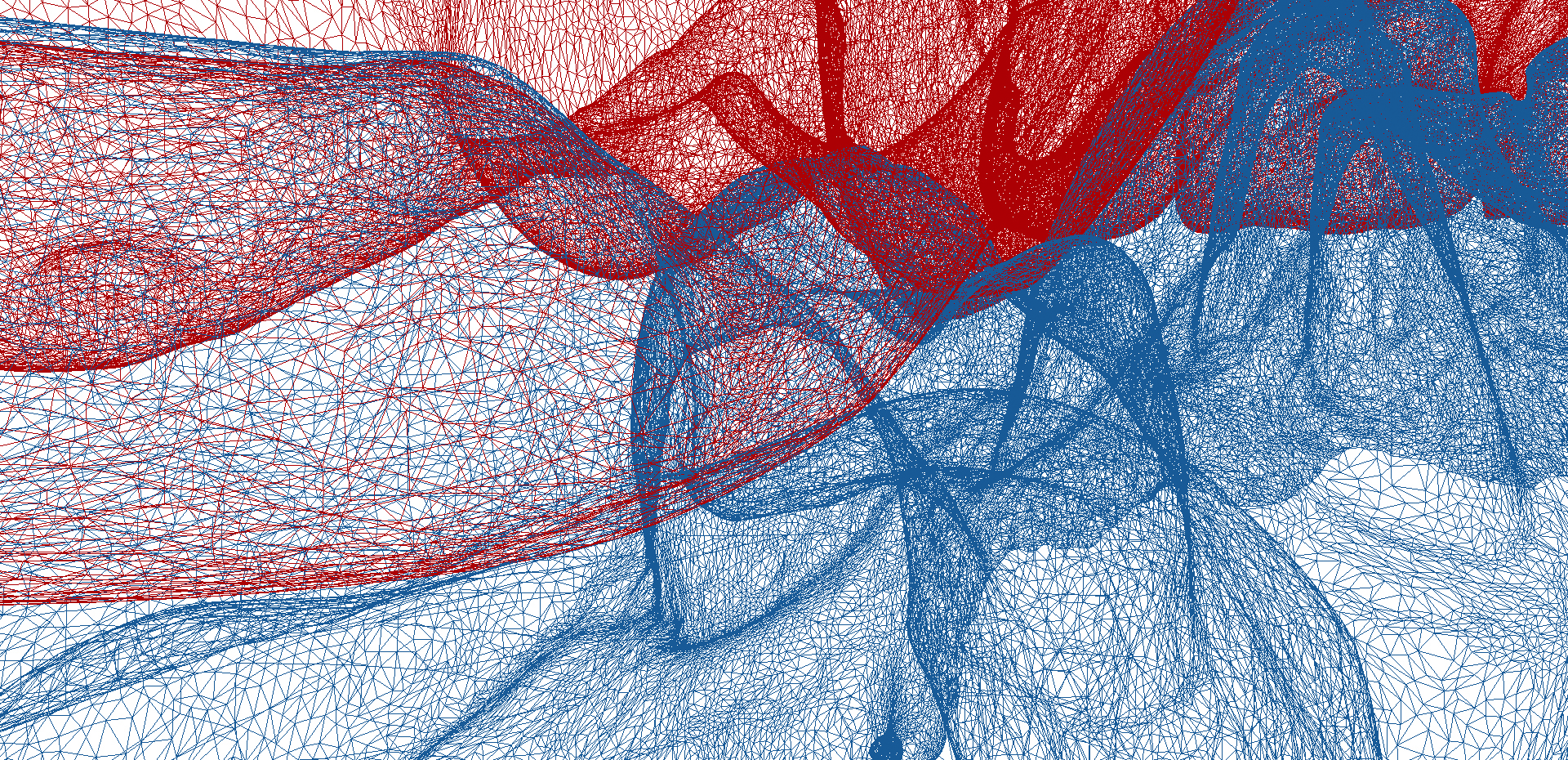
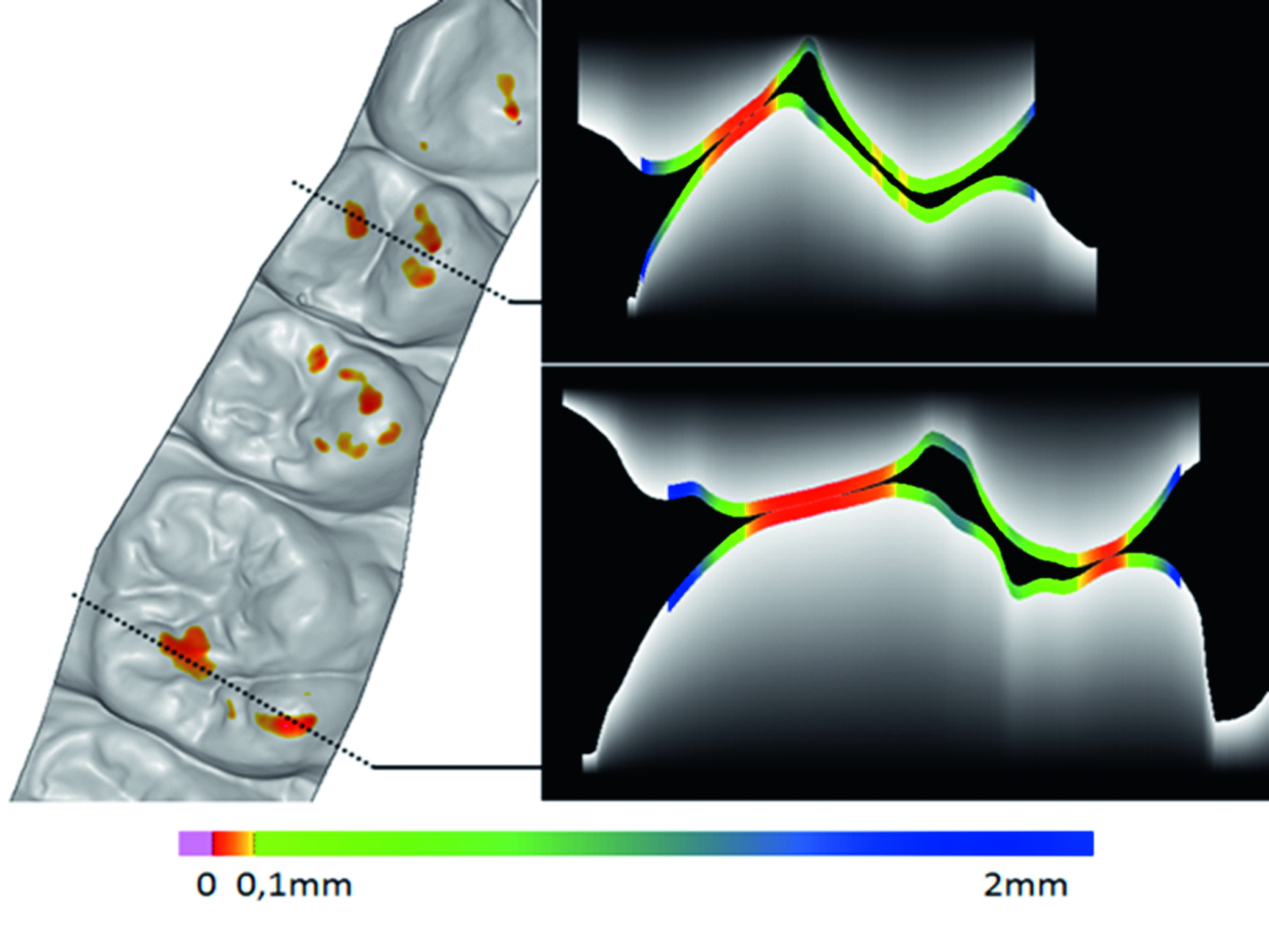
Die Punkte 1 und 2 betreffen primär die okklusale Funktionsweise. Alles, was in Okklusion oder in unmittelbarer Näherung der Okklusion geschieht, ist hier von besonderem Interesse. Dabei muss man sich immer klar sein, dass es bei der digitalen Okklusion nicht zur Okklusion im eigentlichen Sinne kommt. In der digitalen Welt interagieren nicht starre, rigide Körper mit fester Oberfläche, sondern eingescannte Oberflächen, die mit Punktewolken oder Dreiecksnetzen abgebildet werden (Abb.3). Diese können sich durchdringen, was in Wirklichkeit im Mund des Patienten aber nicht vorkommen kann. Deswegen stellt sich in der virtuellen Welt noch vielmehr als im Mund des Patienten die Frage, wann ein Kontakt ein Kontakt ist und wie die Kontaktsituation im Mund des Patienten in der virtuellen Modellwelt dargestellt werden kann. Da es ja virtuell nicht zu einer echten Okklusion kommen kann, behilft man sich damit, die Okklusion als Annäherung der Punktewolken und Dreiecksnetzen bis hin zur Durchdringung zu quantifizieren, um so Kollisionsbereiche zu detektieren. Das Ausmaß der Annährung beziehungsweise der Durchdringung kann farbig markiert werden (Abb.4). Wann ein Kontakt ein Kontakt ist, definiert sich im Grenzbereich zwischen Näherung und Durchdringung, die als okklusaler Kontakt interpretiert wird. Generell könnte dieser Bereich in sinnvollen Grenzen individuell parametrisiert werden. Wie eng oder weit man diesen Bereich wählt, hängt im Prinzip von vielen Faktoren ab nicht zuletzt von der prinzipiellen Genauigkeit, mit der man die Oberflächen der Zahnreihen scannen und daraus ein realistisches Modell generieren kann. Hier unterscheiden sich Dentalscanner von Intraoralscannern, insbesondere wenn es darum geht, ganze Kiefer und nicht nur Teilsegmente einzuscannen.
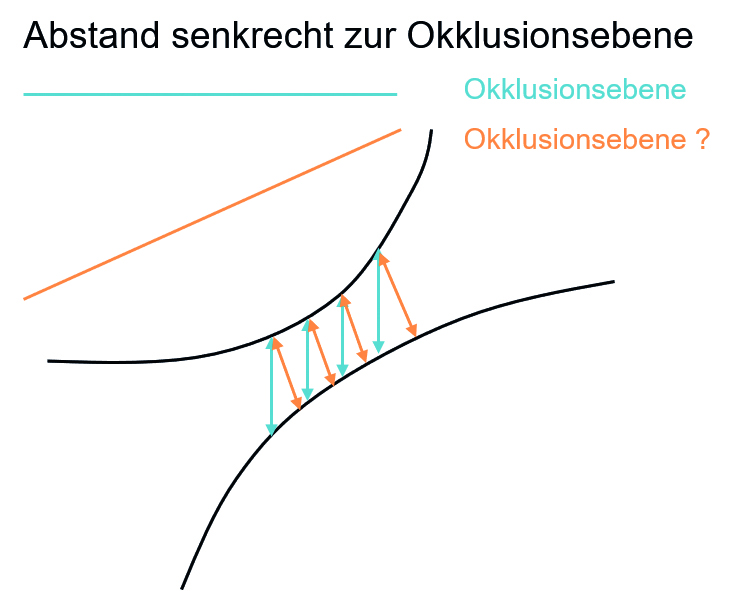
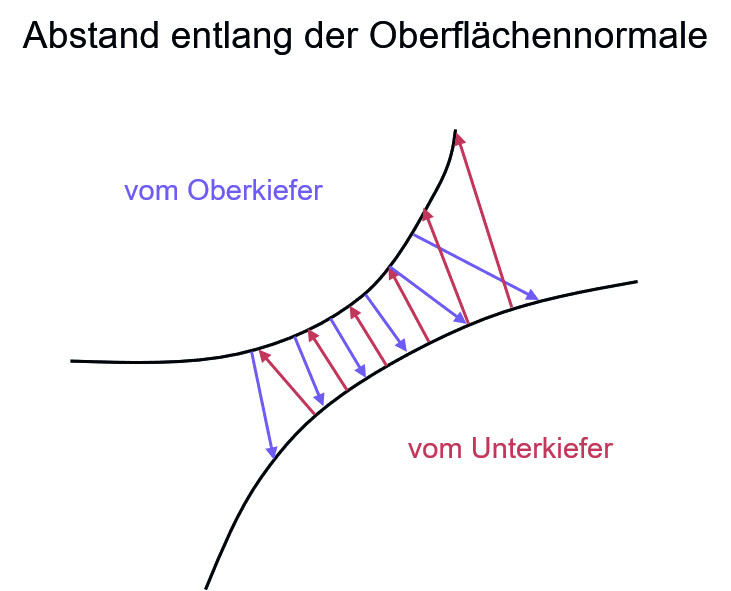
Grundsätzlich verdoppelt sich der Abstandsfehler zwischen zwei gescannten Oberflächen in Abhängigkeit von deren Genauigkeit und Auflösung. Allerdings kommt hinzu, mit welchem Algorithmus der Abstand zwischen den gescannten Oberflächen berechnet wird. Steil abfallende Flanken einer Höckerstruktur sind ein Problem, wenn der interokklusale Abstand mit Bezug zu einer Referenzebene darstellt wird, beispielsweise der Okklusionsebene (Abb.5a). Je nachdem, wie diese Referenzebene variiert wird, ändern sich auch die Abstände zwischen den Okklusalflächen und damit auch die Darstellung der okklusalen Kontakte.
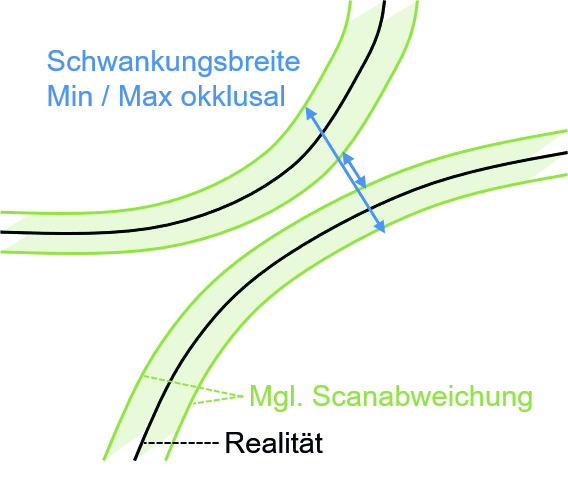
Darüber hinausgehend ist die Anordnung der Dreiecke, mit denen die Flächenrückführung erfolgt, von Bedeutung. Werden Abstände ausgehend von einer Mittensenkrechten eines Dreiecks bis zum Schnittpunkt mit der korrespondierenden Dreiecksfläche des Antagonisten berechnet, variieren die Abstände je nach Angulation der Dreiecke in der Oberfläche (Abb.5b). Hinzu kommt, dass man die Auflösung, mit der man eine Oberfläche scannen kann, nicht beliebig erhöhen kann, ansonsten würde der Umfang der Datenmengen die noch akzeptable Größe bezüglich Rechenkapazität und Rechenzeit schnell übersteigen. Die Lösung wäre eine adaptive Messpunktedichte als Kompromis zwischen Richtigkeit und Speicherbedarf die Schwankungsbreite bei der Abstandsmessung muss jedoch berücksichtigt werden (Abb.5c). Unter Berücksichtigung dieser Aspekte ist zum gegenwärtigen Zeitpunkt eine Genauigkeit zur Darstellung der okklusalen Kontakte zwischen 50 bis 100 µm als realistisch anzunehmen. Gärtner benannte für einen der ersten virtuellen Artikulatoren DentCAM eine Genauigkeit dynamischer Kontakte von ± 76 µm [5].
Es ist aber auch die Frage, wie genau man sinnvollerweise die Okklusion bestimmen sollte. Letztlich agieren wir im virtuellen Raum bislang mit starren Körpern und Oberflächen, was nicht den biomechanischen und biologischen Bedingungen entspricht. Die Zähne besitzen eine Eigenbeweglichkeit, die bei Kraftschluss zu Positionsverschiebungen im Zahnbogen, zum Beispiel durch Intrudieren in die Alveole, führt. Zusammen mit der Verbiegung der Unterkieferspanne können diese Positionsänderungen 20 bis 40 µm betragen [33]. Ein spezielles Problem ist dabei seit jeher die Abformung der Unterkieferzahnreihe. Die Zahnreihe verformt sich bei Mundöffnung, weswegen man weite Mundöffnungen meiden sollte, aber ohne Mundöffnung das gilt genauso für das Scannen kann eine Abformung eben nicht erfolgen, weswegen ein gewisses Maß einer abformungsbedingten Untergenauigkeit nicht zu vermeiden ist [37]. Deswegen stimmt die Okklusion in maximalem Vielpunktekontakt auf dem Modell bei Bezahnten in aller Regel nicht mit der habituellen Interkuspidation in der Mundhöhle überein. Für eine Übereinstimmung müssen die Zahnreihen am Modell erst anhand eines Okklusionsprotokolls oder Interkuspidationsregistraten nachgearbeitet, das heißt, gezielt an den Oberflächen radiert werden [14].
In der virtuellen Welt können sich aber die Antagonisten durchdringen, was mit Gips- oder Kunststoffmodellen nicht möglich ist. Deswegen ist zu erwarten, dass beim Zulassen eines definierten Ausmaßes einer Durchdringung die digitale Okklusion diese Art der Ungenauigkeit kompensieren kann. Wenn sich also digitale Modelle in Interkuspidation durchdringen beziehungsweise Durchdringungen angezeigt werden, ist das möglicherweise kein Messfehler, sondern Ergebnis der physiologischen Breite biomechanischer Effekte. Die Betrachtung der theoretisch denkbaren und biologisch sinnvollen Angabe eines Zielwerts für die Genauigkeit mag zudem noch von der klinischen Reproduzierbarkeit abhängig sein, mit der eine Okklusionsposition vom Patienten wiederholt eingenommen werden kann. Bei vollbezahnten Patienten und gesicherter Verzahnung kann von einer Reproduzierbarkeit von circa 40 bis 50 µm ausgegangen werden [9]. Im Unterschied dazu kann eine rein gelenkzentrisch definierte Kieferrelation nur im Mittel von 2 bis 3 mm Genauigkeit wiederholt am Patienten registriert werden [3]. Es ergibt deswegen keinen Sinn, im biologischen Sinne genauer als genau werden zu wollen. Zukünftig mag es sein, dass die Dynamisierung eines digitalen Modells die biomechanische Variabilität berücksichtigt und Eigenbeweglichkeiten und Verformungen in definierten Grenzen zulässt und damit der biologischen Wirklichkeit deutlich näher kommt.
Digitale Okklusionsdiagnostik
Ein ganz wesentlicher Punkt ist der Informationswert, dem eine einzelne Kontaktbeziehung im Kontext aller anderen zukommt [24,16]. Deren räumliche und zeitliche Verteilung über den Zahnbogen wird bei der instrumentellen Okklusionsdiagnostik beurteilt, sowie die Qualität der Zahnführungen bei simulierten Gleitbewegungen in latero-, medio-, pro- beziehungsweise auch retrusiver Richtung, je nach dem Anteil der Freiheitsgrade, die der Artikulator im definierten Bewegungsraum zulässt. Digitale Artikulatoren, das heißt die digitalen Kopien mechanischer Vorbilder, lassen sich in gleicher Weise wie die mechanischen anwenden eine adäquate schädelgelenkbezügliche Modellorientierung und Einstellung der Steuerelemente vorausgesetzt. Systeme, die sich primär aus den Anforderungsprofilen zahntechnischer Arbeiten entwickelt haben, bieten Lösungen, die entweder gleich den kompletten Artikulator mit fertig montierten Modellen einscannen (Zirkonzahn) oder Hilfsteile vorsehen, die eine Übertragung der montierten Modellsituation mit gleichgeschalteten Sockelträgern beim Scannen sicherstellen (Amann Girrbach). Eine besondere Lösung bietet die Firma Zebris: Der Kopplungslöffel, der die Ankopplung der elektronischen Registrierung mit digitalen Modellen sichert, ist Träger von Impressionen der Oberkieferzahnreihe und dient als Hilfsteil, mit dem sich eine der virtuellen Welt entsprechende Modellorientierung im mechanischen Artikulator herstellen lässt (Abb.6).
Generell sichert diese Vorgehensweise die Vergleichbarkeit zwischen der Situation im mechanischen Artikulator mit der Situation im digitalen Artikulator. Da hierbei Modelle eingescannt werden, bedarf es genau der gleichen Anforderungen an die Qualität der Abformung und an das Modell. In jedem Fall müssen Abformartefakte an den okkludieren Flächen sorgfältig entfernt werden. Sofern die habituelle Interkuspidationsposition dargestellt werde


